
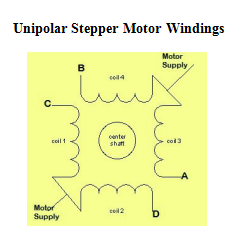
UNIPOLAR STEPPER MOTOR
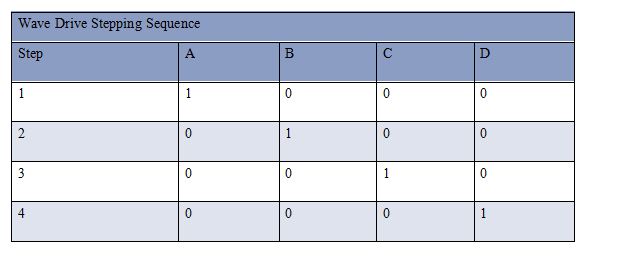
Wave Drive:
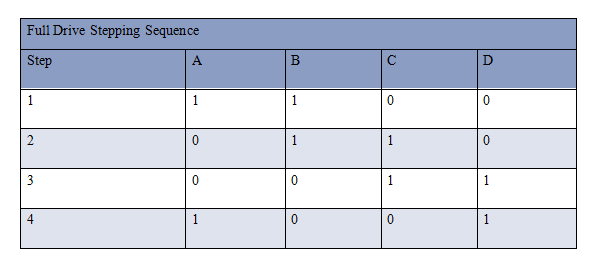
Full Drive:
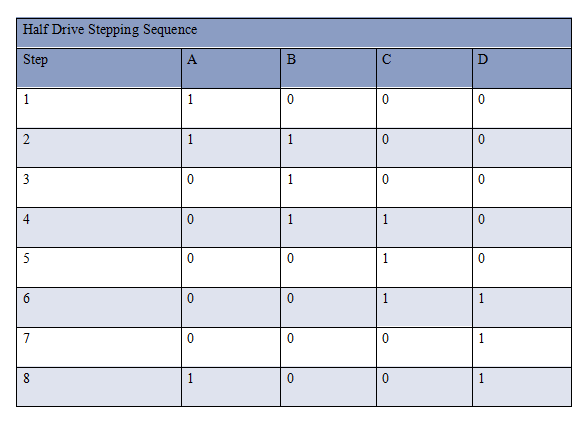
Half Drive:
Bipolar Stepper Motor

Applications
/* Name : main.c
* Purpose : Source code for UNIPOLAR FULL STEP DRIVE STEPPER MOTOR Interfacing with ARM LPC1248.
* Author : Gemicates
* Date : 2018-03-02
* Website : www.gemicates.org
* Revision : None
*/
#include <LPC214X.H> // header file for LPC21XX series
void delay( unsigned int value ) // delay function declaration
{
unsigned int i,j; // This function produces a delay in msec
for(i=0;i<value;i++)
for(j=0;j<5000;j++);
}
int main() // main function
{
unsigned char i;
IODIR0 =0x0000000F;
while(1)
{
for(i=0;i<1;i++) // clockwise rotation
{
IOCLR0=0x0000000F;
IOSET0=0x00000003;
delay(1000);
IOCLR0=0x0000000F;
IOSET0=0x00000006;
delay(1000);
IOCLR0=0x0000000F;
IOSET0=0x0000000C;
delay(1000);
IOCLR0=0x0000000F;
IOSET0=0x00000009;
delay(1000);
}
for(i=0;i<1;i++) // ANTIClock wise rotation
{
IOCLR0=0x0000000F;
IOSET0=0x00000009;
delay(1000);
IOCLR0=0x0000000F;
IOSET0=0x0000000C;
delay(1000);
IOCLR0=0x0000000F;
IOSET0=0x00000006;
delay(1000);
IOCLR0=0x0000000F;
IOSET0=0x00000003;
delay(1000);
}
}
}
/* Name : main.c
* Purpose : Source code for UNIPOLAR HALF STEP DRIVE STEPPER MOTOR Interfacing with ARM LPC1248.
* Author : Gemicates
* Date : 2018-03-02
* Website : www.gemicates.org
* Revision : None
*/
#include <LPC214X.H> // header file for LPC21XX series
void delay( unsigned int value ) // delay function declaration
{
unsigned int i,j; // This function produces a delay in msec
for(i=0;i<value;i++)
for(j=0;j<5000;j++);
}
int main() // main function
{
unsigned char i;
IODIR0 =0x0000000F;
while(1)
{
for(i=0;i<1;i++) // clockwise rotation
{
IOCLR0=0x0000000F;
IOSET0=0x00000009;
delay(1000);
IOCLR0=0x0000000F;
IOSET0=0x00000001;
delay(1000);
IOCLR0=0x0000000F;
IOSET0=0x00000003;
delay(1000);
IOCLR0=0x0000000F;
IOSET0=0x00000002;
delay(1000);
IOCLR0=0x0000000F;
IOSET0=0x00000006;
delay(1000);
IOCLR0=0x0000000F;
IOSET0=0x00000004;
delay(1000);
IOCLR0=0x0000000F;
IOSET0=0x0000000C;
delay(1000);
IOCLR0=0x0000000F;
IOSET0=0x00000008;
delay(1000);
}
for(i=0;i<1;i++) // ANTIClock wise rotation
{
IOCLR0=0x0000000F;
IOSET0=0x00000008;
delay(1000);
IOCLR0=0x0000000F;
IOSET0=0x0000000C;
delay(1000);
IOCLR0=0x0000000F;
IOSET0=0x00000004;
delay(1000);
IOCLR0=0x0000000F;
IOSET0=0x00000006;
delay(1000);
IOCLR0=0x0000000F;
IOSET0=0x00000002;
delay(1000);
IOCLR0=0x0000000F;
IOSET0=0x00000003;
delay(1000);
IOCLR0=0x0000000F;
IOSET0=0x00000001;
delay(1000);
IOCLR0=0x0000000F;
IOSET0=0x00000009;
delay(1000);
}
}
}
/* Name : main.c
* Purpose : Source code for UNIPOLAR WAVE DRIVE STEPER MOTOR Interfacing with ARM LPC1248.
* Author : Gemicates
* Date : 2018-03-02
* Website : www.gemicates.org
* Revision : None
*/
#include <LPC214X.H> // header file for LPC21XX series
void delay( unsigned int value ) // delay function declaration
{
unsigned int i,j; // This function produces a delay in msec
for(i=0;i<value;i++)
for(j=0;j<5000;j++);
}
int main() // main function
{
unsigned char i;
IODIR0 =0x0000000F;
while(1)
{
for(i=0;i<1;i++) // clockwise rotation
{
IOCLR0=0x0000000F;
IOSET0=0x00000001;
delay(1000);
IOCLR0=0x0000000F;
IOSET0=0x00000002;
delay(1000);
IOCLR0=0x0000000F;
IOSET0=0x00000004;
delay(1000);
IOCLR0=0x0000000F;
IOSET0=0x00000008;
delay(1000);
}
for(i=0;i<1;i++) // ANTIClock wise rotation
{
IOCLR0=0x0000000F;
IOSET0=0x00000008;
delay(1000);
IOCLR0=0x0000000F;
IOSET0=0x00000004;
delay(1000);
IOCLR0=0x0000000F;
IOSET0=0x00000002;
delay(1000);
IOCLR0=0x0000000F;
IOSET0=0x00000001;
delay(1000);
}
}
}
/* Name : main.c
* Purpose : Source code for BIPOLAR STEPPER MOTOR Interfacing with ARM LPC1248.
* Author : Gemicates
* Date : 2018-03-02
* Website : www.gemicates.org
* Revision : None
*/
#include <LPC214X.H> // header file for LPC21XX series
void delay( unsigned int value ) // delay function declaration
{
unsigned int i,j; // This function produces a delay in msec
for(i=0;i<value;i++)
for(j=0;j<5000;j++);
}
int main() // main function
{
unsigned char i;
IODIR0 =0x0000000F;
while(1)
{
for(i=0;i<1;i++) // clockwise rotation
{
IOCLR0=0x0000000F;
IOSET0=0x00000008;
delay(1000);
IOCLR0=0x0000000F;
IOSET0=0x00000002;
delay(1000);
IOCLR0=0x0000000F;
IOSET0=0x00000004;
delay(1000);
IOCLR0=0x0000000F;
IOSET0=0x00000001;
delay(1000);
}
for(i=0;i<1;i++) // ANTIClock wise rotation
{
IOCLR0=0x0000000F;
IOSET0=0x00000001;
delay(1000);
IOCLR0=0x0000000F;
IOSET0=0x00000004;
delay(1000);
IOCLR0=0x0000000F;
IOSET0=0x00000002;
delay(1000);
IOCLR0=0x0000000F;
IOSET0=0x00000008;
delay(1000);
}
}
}